
[ad_1]
Ceiling fan turns into a “spaceship” SCARA robotic arm
— March twenty sixth, 2024

Everyone knows how annoying a ceiling fan will be when it isn’t balanced effectively and that annoyance completely demonstrates the need of a great, sturdy bearing. A ceiling fan’s bearing wants to permit for easy rotational movement with as little friction as potential, whereas fully constraining motion in each different axis. These properties make a ceiling base a surprisingly good start line for a SCARA, as demonstrated in tuenhidiy’s current Instructables write-up.
Of their tutorial, tuenhidiy refers to this as a “Spaceship Scara Arm.” It isn’t precisely clear why they selected the “spaceship” terminology, however it’s much like a traditional SCARA (Selective Compliance Meeting Robotic Arm) — only one with solely two levels of freedom (DOF).
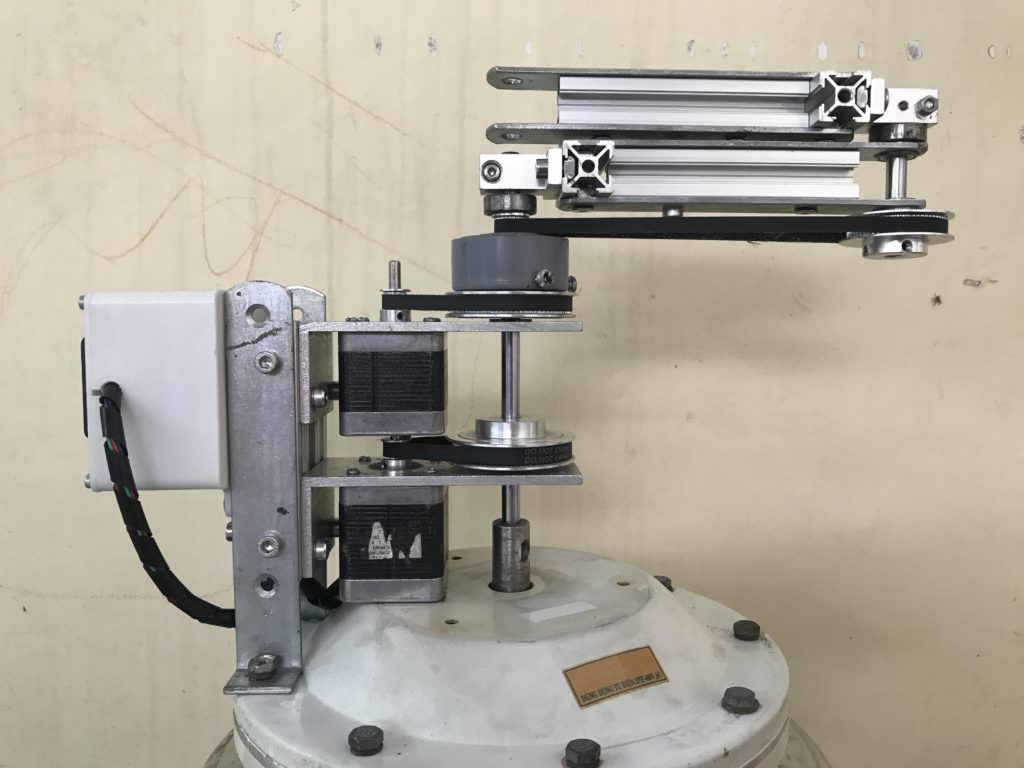
Your complete level of a SCARA is that it’s absolutely constrained, aside from rotation across the Z axis at every joint. After their ceiling fan broke, tuenhidiy observed that the fan’s base with its beefy bearing could be excellent for this software. They took that, added a few stepper motors and belts, some aluminum extrusion, and a pair extra bearings to create this straightforward SCARA.
An Arduino UNO Rev3 board controls these motors by way of a CNC Defend V3. Grbl firmware makes it simple to manage the positions of the motors utilizing nearly any software program a consumer might probably need. Some easy calculations concerning the arm’s geometry and equipment ratios ought to let applicable software program decide precisely the place it’s in area. For an indication, tuenhidiy added a DC solenoid for its magnetic capabilities. However anybody replicating this challenge can add their very own finish effector to go well with their wants.
You may comply with any responses to this entry by way of the RSS 2.0 feed.
You may depart a response, or trackback from your individual web site.
[ad_2]